
Insects and their relatives provide a major part of the faunal biomass in many terrestrial ecosystems. As they populate nearly all environments including human work and living places we are always faced with their company. However, though they creep and scuttle about with articulated legs just as vertebrates like us do, the body plan of arthropods deviates tremendously from ours.
Let’s only take their typically sprawled posture and the high number of walking legs that considerably affect the way these creatures move. As a consequence they have always more than two legs on the ground over a wide range of running speeds providing high static stability. These features attract the attention of engineers aiming at constructing legged machines that shall, one day, outperform wheel-driven devices on rugged and treacherous terrain.

It’s common knowledge that, for vertebrates, gait changes are an inherent feature of locomotion enabling acceptable energy expenditure over a wide range of ground conditions and running speeds. Thus, different gaits are well described and analysed in bipeds such as men and quadrupeds such as our emotionally closest fellow creatures, like horses and domestic dogs. These gait changes are primarily characterised by changes in the body dynamics, i.e. whether and how movement energy is temporarily stored in elastic structures, such as the Achilles tendon or the arch of foot, and recovered for the next stride.
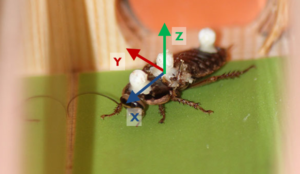
For fast running insects and despite their ecological importance and their role as biological models for technical implementations, ours is the first study focusing on gait changes and the impact of slipperiness onto their running abilities. To that end we shooed the cockroaches through a narrow channel whose floor was lined with sandpaper of defined asperity sizes and videotaped the runs with a high-speed camera.
With our experimental approach we were able to demonstrate that fast running insects adapt their gait at mid-speed by adjusting their leg co-ordination pattern and their body dynamics. To put it straight, the animals switched from a multi-legged equivalent of trot Nauphoeta Slow (Supplementary File 2) with strictly alternating sets of legs at intermediate speeds, to a multi-legged version of tölt at high running speeds Nauphoeta Fast (Supplementary File 1). While trot is characterised by repetitive up and down movements of the animals body, tölt is a gait for which Icelandic horses are famous for and which enables particularly smooth rides.
In the case of insects which run with up to 15 strides per second the gait shift can result also in a stabilization of the gaze which otherwise would oscillate with each step resulting in severely blurred vision.
We were particularly surprised to find that the adjusted leg co-ordination synchronizes with a shift in the mechanisms which stabilize the animals’ movement. Thus, the modified gait at high speed and on slippery surfaces was accompanied by a shift from static to dynamic stabilization. This shift minimizes the central nervous system’s need to control the motion whilst simultaneously attaining high energy efficiency.
Accordingly, adapting the coordination patterns of robot legs to those of fast-running cockroaches could help poly-pedal robots to burn energy more efficiently, and hence increase its endurance in inhospitable environments. We hope that our research may help to convince engineers that it is not enough to only increase stride frequency in order to increase speed when energy expenditure and smoothness of the ride are also relevant criterions.
- Cockroaches shift gears when speeding up their pace - 12th December 2017
Comments