“Although much of the future of science will be driven by computational research, there is a critical need to maintain a close connection to the experimental research.”
A seven year old boy shown a computer program for the first time was so enthralled by it that he set himself up for a career working with computational models. Kyle Harrington, now a postdoctoral researcher in the Bentley Group at Harvard Medical School, is this year’s BMC Ecology Image Competition winner for the ‘Theoretical ecology and models’ section.
Kyle was hooked by the idea of using simple algorithms to generate complex patterns and behaviours and trained to apply computational techniques to biotechnological and ecological sciences. Later, at Hampshire College, he was formally introduced to evolution and morphogenesis models. He has been working on computational models for theoretical biology ever since.
Why did you become interested in this area of research?
I started off with the ambition of specializing in artificial intelligence. Upon learning a bit about the field, I discovered that such research did not often lead to the type of intelligence that attracted me to it in the first place. I soon found out that the field with the most intuitive appeal was artificial life.
Artificial life is a field that embraces the idea that the intelligence of an individual is a reflection of its ecological, evolutionary, and developmental histories and contexts. After spending a number of years developing evolutionary simulations, I am now working on using computational techniques to unify theories and models across the ecological, evolutionary, and developmental scales.
How did you create the image?
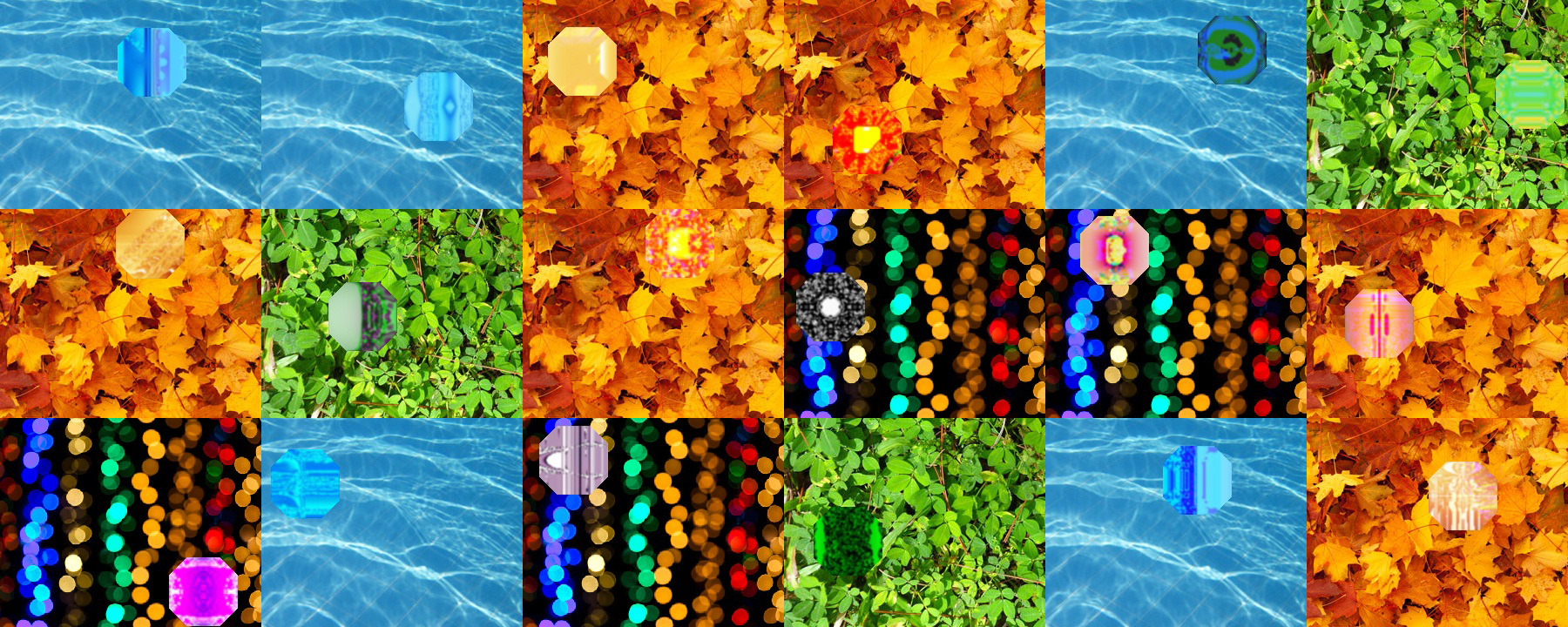
This image is a collage of prey patterns that were created using computational techniques for simulating coevolution. The experiments are reminiscent of the respective natural processes that drive the evolution of camouflage.
What were you trying to investigate?
An environment is chosen for each simulation, which corresponds to the background image, and then a visually patterned prey is placed within an instance of that environment. Predators with a virtual vision system are then tasked with predicting whether each location in the environment contains a prey or not. Each predator competes against each prey from both populations.
Finally, individual predators and prey are selected with bias for higher fitness for reproduction into the next generation, where prey of higher fitness are more elusive and predators of higher fitness are more discerning. Although both prey and predators begin the simulation with no a priori knowledge of their environments, reciprocal selection drives predators to focus on relevant features from the environment and prey to adopt camouflaged patterns that reduce their detectability.
What did your study find?
We conducted a study across a range of environments of varying complexity and found that greater complexity corresponded to improved engagement between predators and prey. In other words, coevolution in simple environments would, at times, lead to situations where prey matched their environment so well that they were undetectable by predators.
Once prey reached this point, there was no longer any selective pressure to maintain camouflage, and patterns would no longer match their environments. However, in more complex natural environments camouflage was maintained and both populations remained engaged, driving reciprocal selection. Additionally, we have presented one of the most visceral computational models of a successful co-evolutionary arms race that we are aware of in the literature to date. This study was conducted in collaboration with an excellent computer science undergraduate, Jesse Freeman, and my PhD adviser, Jordan Pollack.
We published the study as:
Harrington, K., J. Freeman, and J. Pollack, (2014) “Coevolution in Hide and Seek: Camouflage and Vision”. In Proceedings of Artificial Life XIV, pp. 25-32.

Comments